サーボを動かす: 単純にサーボモーターを回してみよう
今回のレッスンから、obniz Starter Kitのパーツを使っていきます。
まずは、動きのわかりやすい「サーボモーター」を動かしてみましょう。
サーボモーターとは?
皆さんがモーターといって思い浮かべるのは、電源を入れるとぐるぐると回り続けるモーターかもしれません。
サーボモーターはそういったモーターとは異なり、指定した角度に回転させることのできるモーターです。
指定した角度に動かすことができるので、ロボットの関節部分などにもよく使用されています。
今回はそうしたサーボモーターを、角度を指定して動かすことに挑戦します。
接続
では、早速サーボモーターをobnizに繋いでみましょう。
まず、サーボモーターを袋から取り出してください。

中にはサーボモーターとサーボホーン(ホーンとも言います)というパーツが入っています。
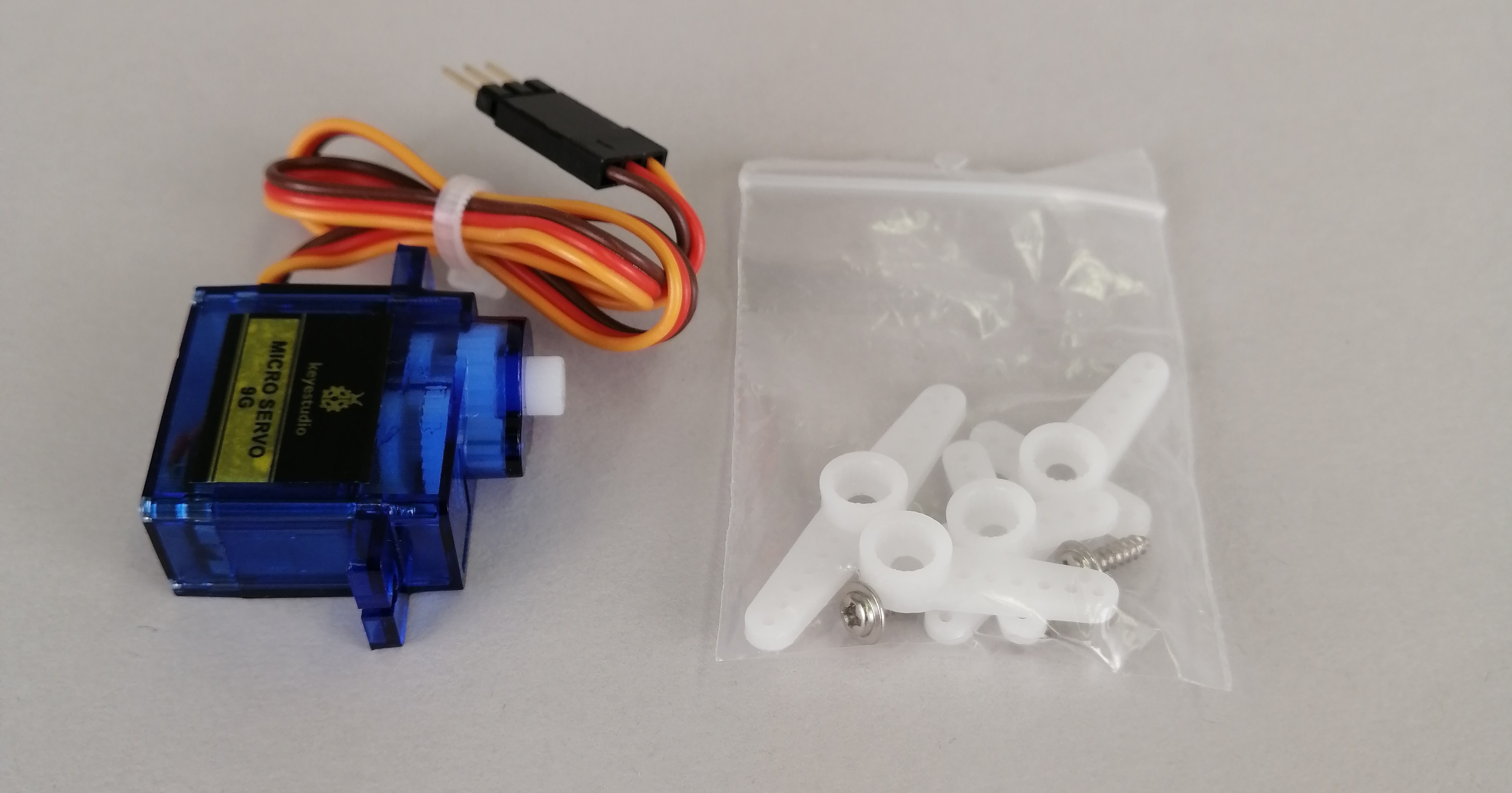
ホーンは先に何かを取り付けてその物体を動かす為のパーツですが、付けると回転や回転した方向が分かりやすいので付けてみましょう。
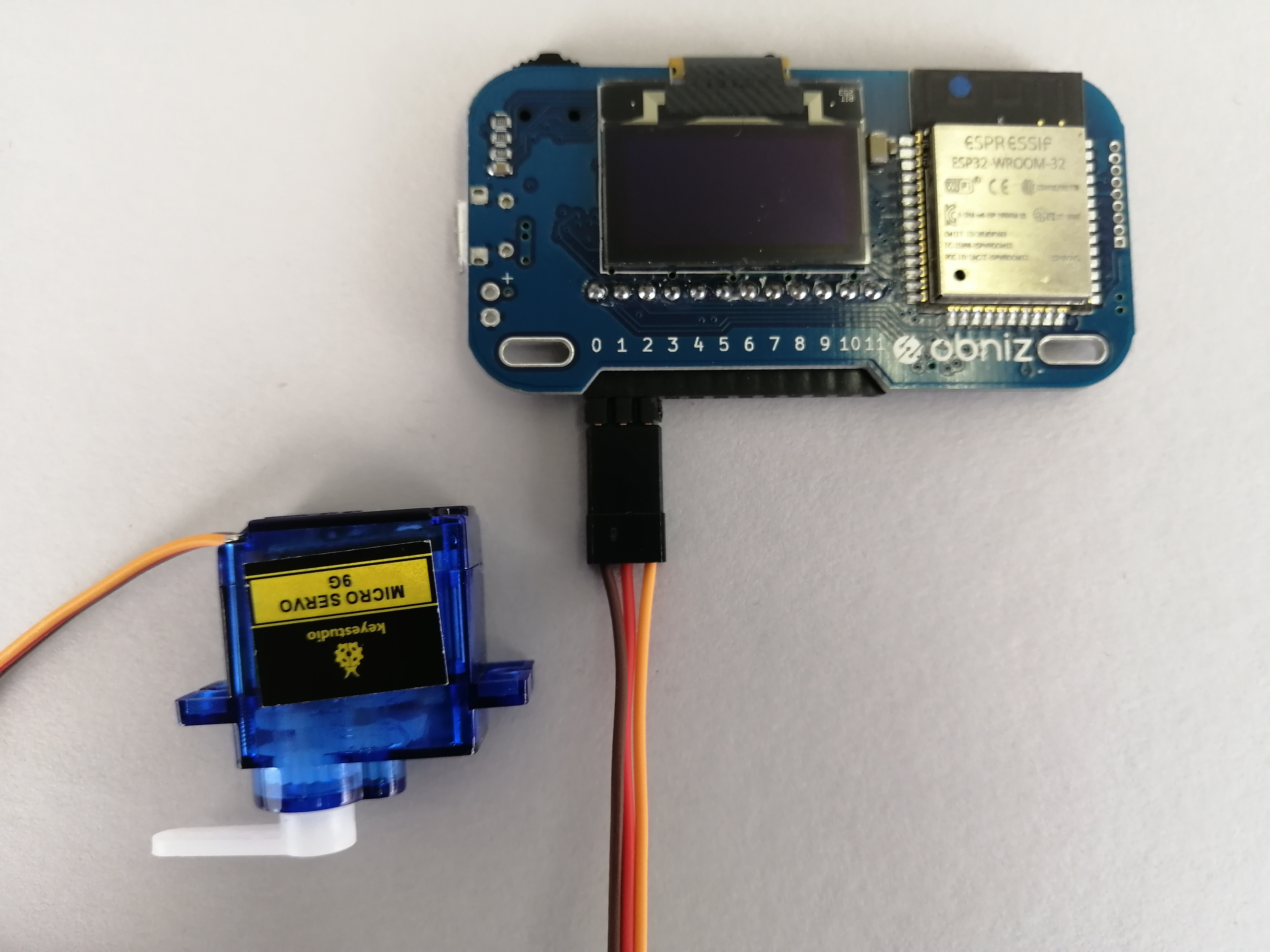
そうしたら、obnizと繋いでみましょう。
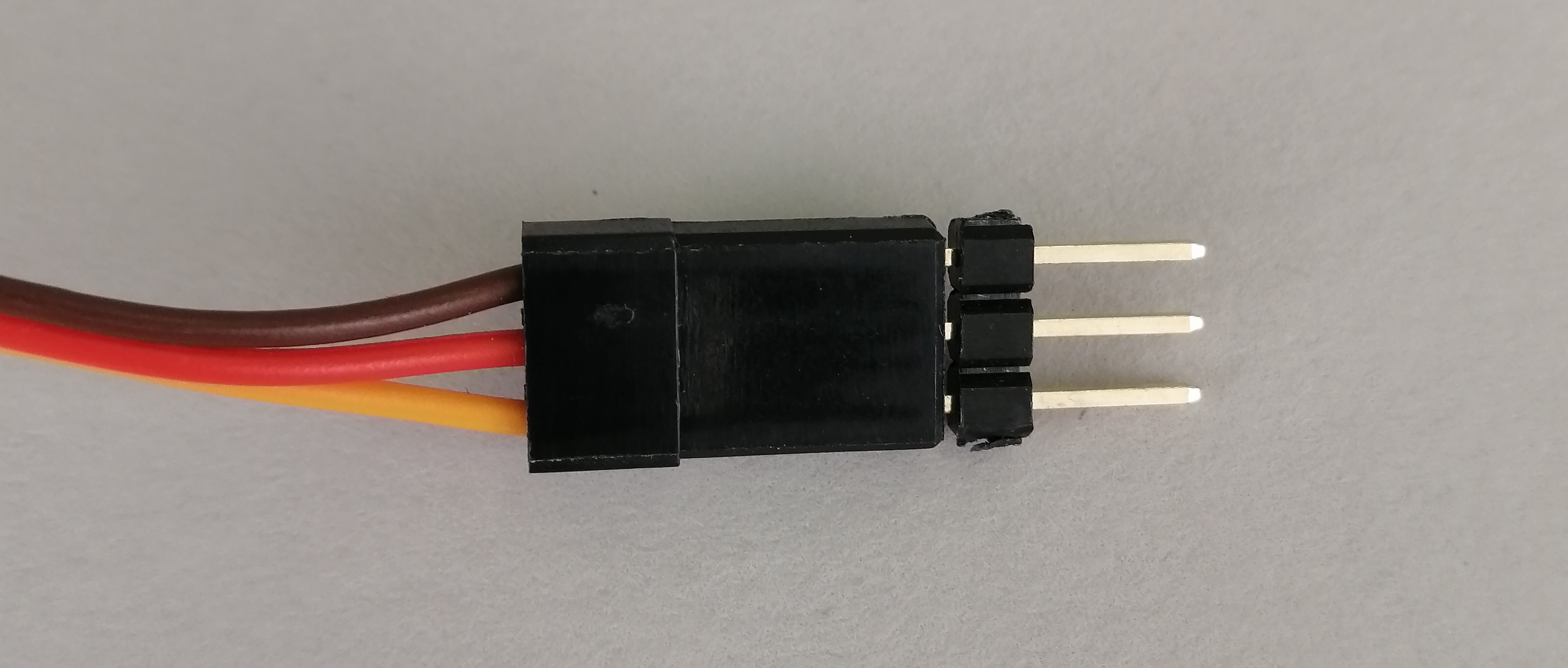
サーボモーターには3つ線があり、それぞれgnd(グラウンド)、vcc(電源電圧)、signal(信号)と分かれています。
今回は以下のように接続します。
| obnizのピン番号 | サーボモーターの線 |
|---|---|
| 0 | gnd(茶) |
| 1 | vcc(赤) |
| 2 | signal(黃) |
プログラム
次に、サーボモーターを回転させるプログラムを作りましょう。
ブロックプログラム入門の「ならべてプログラムしてみよう」では、ブロックエディタの使い方が説明されています。
操作方法がわからなくなったときは、ここを参考にしてください。
左側の「キット」カテゴリを選択すると、「AIRobotKit」「IoTHomeKit」「StarerKit」の3種類のカテゴリが現れます。3番目の「StarterKit」を開いてみてください。
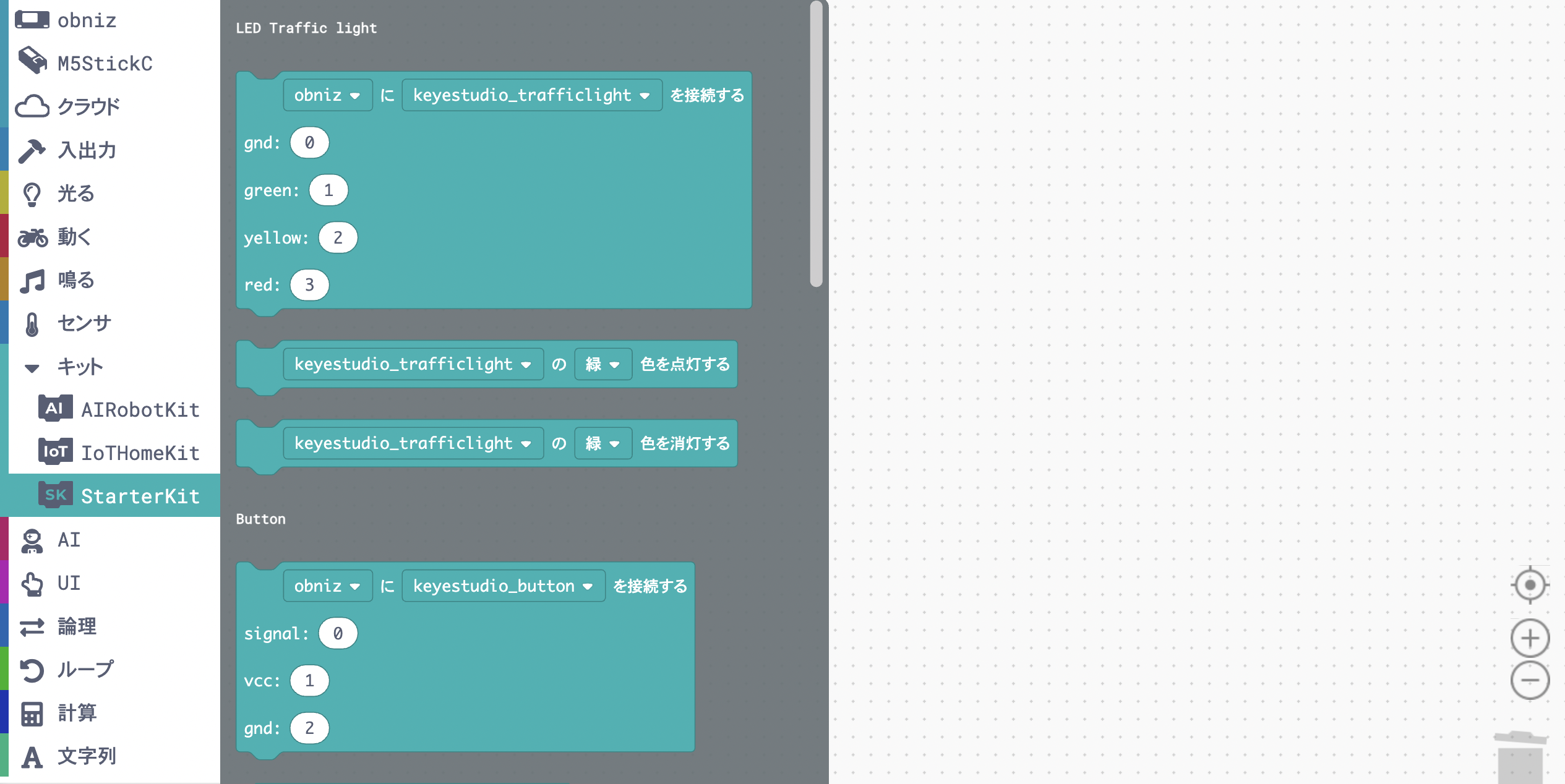
この中には、Starter Kitのパーツを使うためのブロックが入っています。今後のレッスンでもここからブロックを選んで使っていくことになります。
今回は一番下までスクロールして、「ServoMotor」のブロックを使用します。
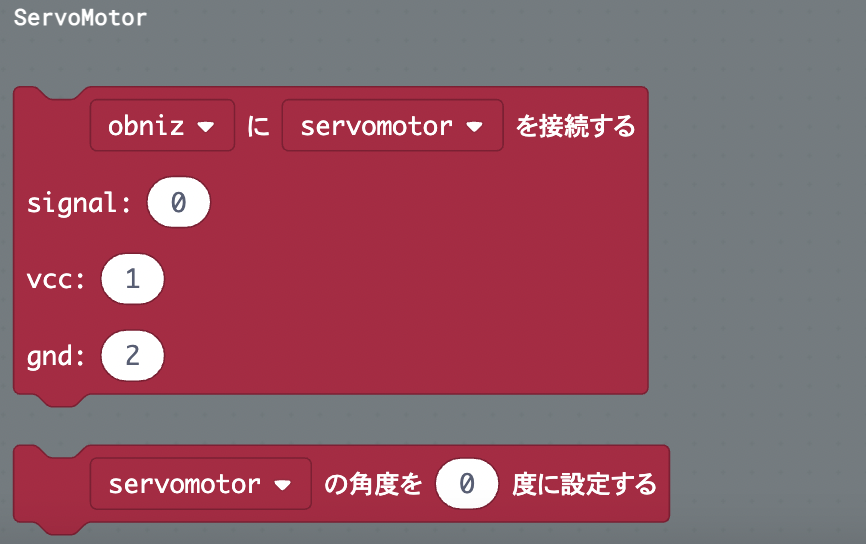
これらのブロックを並べて、以下のようなプログラムを作ってみてください。
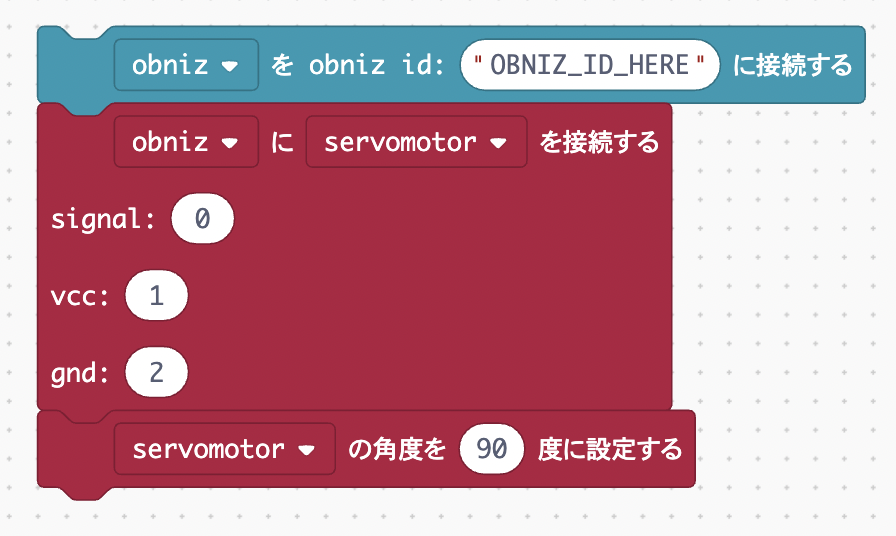
プログラムを実行すると、サーボモーターが動くはずです。
もし動かなかった場合は、もともとサーボモーターの角度が90度だったかもしれないので、別の角度に指定してもう一度実行してみましょう。
発展:サーボモーターを交互に動かす
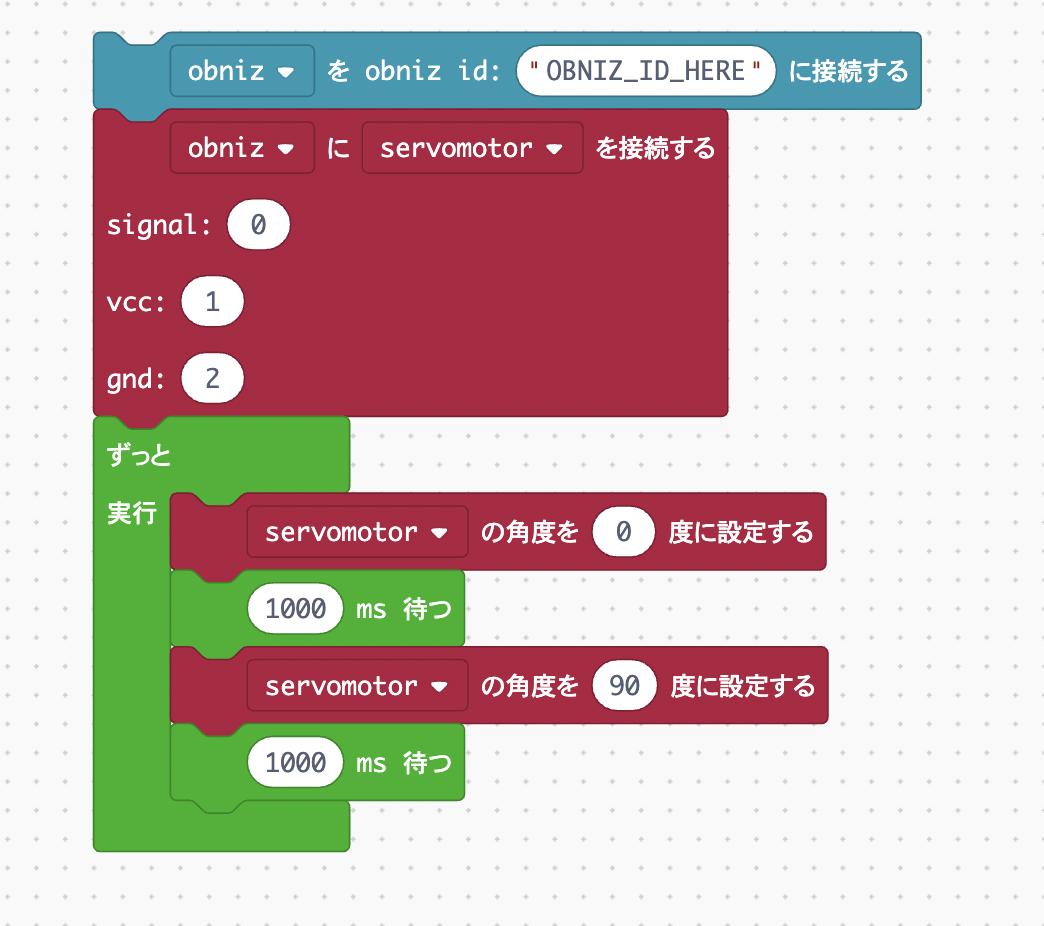
もう少しプログラムに手を加えて、サーボモーターが0度と90度を交互に動くようにしてみましょう。
プログラムをずっと動くようにするには、ループブロックを使います。
参考:ブロックをずっと動かすには
今回は「ずっと実行」のブロックと「待つ」ブロックを使って、1秒ごとにサーボモーターが0度と90度をいったりきたりするプログラムを作ってみます。
「待つ」ブロックの単位がms(ミリ秒)なので、1秒待つには1000(ms)と入力することに注意しましょう。
うまく動きましたか?
ブロックプログラムでは、このようにブロックを組み合わせるだけで、簡単にいろいろなものを動かすことができます。
これでサーボモーターを動かすことができるようになったので、次はこのサーボモーターをブラウザ上で操作することに挑戦してみましょう!